
Drosha:art100, Misha_03, http://alex-avr2.livejournal.com/9250.html
Cпасибо. Понял. С фольгой травить. Как народ только не развлекается. ![]() Может когда-нибудь тоже поразвлекаюсь
Может когда-нибудь тоже поразвлекаюсь ![]()
Drosha:art100, Misha_03, http://alex-avr2.livejournal.com/9250.html
Cпасибо. Понял. С фольгой травить. Как народ только не развлекается. ![]() Может когда-нибудь тоже поразвлекаюсь
Может когда-нибудь тоже поразвлекаюсь ![]()
тут в руки попал экран Innolux AT043TN24, можно его как то к ардуино подключить малой кровью, или лучше не заморачиваться ?

Drosha:тут в руки попал экран Innolux AT043TN24, можно его как то к ардуино подключить малой кровью, или лучше не заморачиваться ?
1 надо узнать его чип
2 почитать даташит если паралельные шины теоретически 8 бит - arduino uno, 16 - бит arduino mega чисто теоретически, I2C в идеале, но отлаживать значительно сложней.
3 поискать комбинацию чипа и arduino например ST7781 Arduino и читаем мои посты веселье http://forum.arduino.cc/index.php?topic=223769.0
4 поняв что ближе попытатся готовую библиотеку подправить под себя
5 надо понимать что с ростом точек резко надо увеличивать скорость контроллера
6.официальная 180x180 и на 16 мегагерцах и последовательной шинке летает. Тут вероятность успеха 99%.
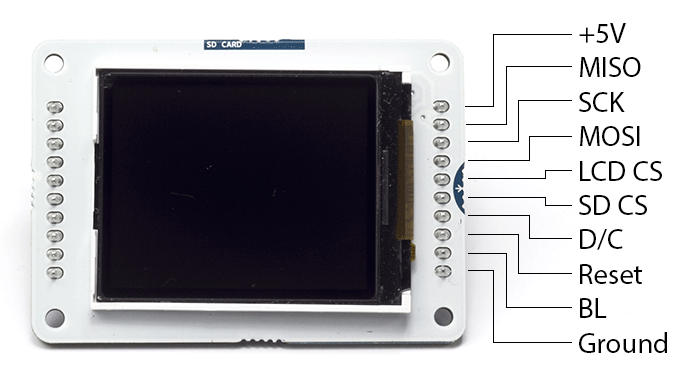
Экран 1.77" по диагонали, с 160 x 128 пикселей. TFT библиотека взаимодействует с экрана контроллера через SPI при использовании TFT библиотека.
Я развлекался веселился 320x240 https://yadi.sk/d/EPYljwnIKAWUT мне как-бы скорости хватало одну точку обрабатывать, но дальнейшая 8 битовая скорострельность ST7781 напрягала. Не нашел видео где регулятор уровня стерео писал. Прикручивают 7 дюймовые к многоножкам mega но вероятность успеха 5% и как меню статичное еще ничего 16 мегагерц хватает.
7.Cудя по черным точкам на шлейфе, думаю там выбран режим чипа, явно не на 8 проводков. Для переключения режимов 1 4 8 16 как вы дымаете сколько резисторов хватит? Может сначала надо понять под какой чип этот экранчик разрабатывался, и вы увидите что там небось графикозаточенный типа Intel Graphics на 1 гигагерц. А вы пытаетесь чип, которому кнопочку/лампочку поморгать, заставить тысячи точек моргать.
"А arduin-ке головушка не бобо"
Для таких фанатов выпустили 3-ех вольтовую 32 битную многоножку. Китайцы ее уже дешево за 16$ паяют.
Но народ ее еще пока обкатывает. Да. В основном на экранчиках за 2-ух кратное ускорение по результату.
Разрядность в 4 раза увеличили а скорость всего в 2 раза поднялась.
Всем привет. Решил поделиться своей серьезной разработкой на данном форуме. Думаю, вас заинтересует.
Кратко, это многоцелевой колесный робот.
Способен автономно двигаться в замкнутом пространстве, имеется управление роботом при помощи смартфона, а видеокамера спереди способна распознавать цветные объекты и следовать за ними. А БК мотор способен разогнать данного малыша до 60 км/ч!
Пишите в личку, скину страницу проекта.
Там документация, подробное описание робота, что он умеет и для чего он. Я вижу, что без команды мой проект загнется, поэтому если есть интерес развивать данное направление, стучите в личку.
Сейчас я работаю над машинным зрением, но не на Arduino, а на более серьзных платах.
Кратко: Ищу единомышленников! Работать в команде всегда интереснее, чем одному!

maxxlife Сколько? 500 железо ? Может ссылки где заказывать?
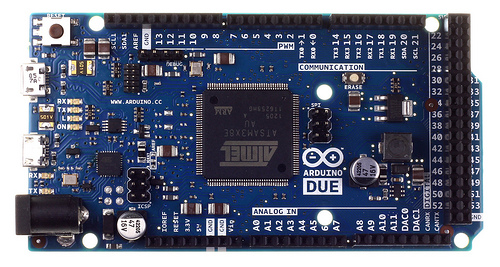
arduino due? stm32? не видно
У кого есть нормальная библиотека и программа для опроса АМ 2302 DHT22 датчика.
dht DHT;
#define DHT22_PIN 6
void setup()
{
Serial.begin(115200);
Serial.println("DHT TEST PROGRAM ");
Serial.print("LIBRARY VERSION: ");
Serial.println(DHT_LIB_VERSION);
Serial.println();
Serial.println("Type,\tstatus,\tHumidity (%),\tTemperature (C)");
}
void loop()
{
// READ DATA
Serial.print("DHT22, \t");
int chk = DHT.read22(DHT22_PIN);
switch (chk)
{
case DHTLIB_OK:
Serial.print("OK,\t");
break;
case DHTLIB_ERROR_CHECKSUM:
Serial.print("Checksum error,\t");
break;
case DHTLIB_ERROR_TIMEOUT:
Serial.print("Time out error,\t");
break;
default:
Serial.print("Unknown error,\t");
break;
}
// DISPLAY DATA
Serial.print(DHT.humidity, 1);
Serial.print(",\t\t");
Serial.println(DHT.temperature, 1);
delay(2000);
}
Вчера на день рождения сотруднику подарили arduino uno r3. 

Нас ардуинщиков оказалось 2-ое. ![]() Мы в двоем подсаживаем его 3-его на этот наркотик.
Мы в двоем подсаживаем его 3-его на этот наркотик. ![]() За вчера мы ему выдрали из системника кнопки и светодиоды.
За вчера мы ему выдрали из системника кнопки и светодиоды.  Подопытным blink fade и button были пройдены, под наши пинки ногами. Восторженный взгляд в его глазах был замечен.
Подопытным blink fade и button были пройдены, под наши пинки ногами. Восторженный взгляд в его глазах был замечен.  Мы поняли наркотик подействовал.
Мы поняли наркотик подействовал. ![]() Начинает донимать вопросами не пролистав "примеры".
Начинает донимать вопросами не пролистав "примеры". ![]() Был послан на пердварительную оплату 100$ за разьяснение на С. Посмотрим, денежная стимуляция заставила его пролистать и прочитать примеры?
Был послан на пердварительную оплату 100$ за разьяснение на С. Посмотрим, денежная стимуляция заставила его пролистать и прочитать примеры?  Ваш покорный слуга превратился в arduino-наркодилера в составе организованной преступной группы. Ардуино-ОПГ в действии.
Ваш покорный слуга превратился в arduino-наркодилера в составе организованной преступной группы. Ардуино-ОПГ в действии. 
art100:Вчера на день рождения сотруднику подарили arduino uno r3.
Нас ардуинщиков оказалось 2-ое.
Мы вдвоем подсаживаем его 3-его на этот наркотик.
За вчера мы ему выдрали из системника кнопки и светодиоды.
Самое интересное, что вчера, тот самый сотрудник т.е. видимо я, допоздна сидел и читал эту ветку форума, скачал себе PDF для начинающих. И было большое желание пообщаться и позадавать вопросики art100, а как оказалось, я уже видимо его знаю, правда 100$ это многовато, видимо придется разбираться самому ![]() , пока до сих пор балуюсь с fademount, хочу по прежнему попробовать прикрутить пьезодинамик, попробовать побибикать. Короче буду пытаться как-то развиваться. Народ примите новичка в свою группу.
, пока до сих пор балуюсь с fademount, хочу по прежнему попробовать прикрутить пьезодинамик, попробовать побибикать. Короче буду пытаться как-то развиваться. Народ примите новичка в свою группу.
art100 будем знакомы ![]()
P.S. Жена идею подкинула, говорит мол, сделай робот пылесос со своей "ар дуринки", а что интересная идея, правда для меня пока невыполнимая
|
офлайн
Protez1999
Senior Member
Автор темы
|
||
9978 |
18 лет на сайте Город:
|
|

|
Ded140:
через регистр будет все работать??? на ардуине на все ведь не хватит выходов
Ded140:asm+c>>>>нечто
У меня времени как всегда нет. Но выложи схему и код. Среди советов не в тему бывает проскальзывает в тему. spoiler -ом прикройте содержимое. Начните с чего-нибудь.
код для цифр, только он не хочет работать...
#include <avr/io.h>
#include <avr/interrupt.h>
//выводим на сегмент с общим КАТОДОМ (1-сегмент горит, 0 - не горит)
// 0 1 2 3 4 5 6 7 8 9
const unsigned char codes1[10]={0b00111100,0b00011000,0b00101100,0b00111100,0b00011000,0b00110100,0b00110100,0b00011100,0b00111100,0b00111100};
const unsigned char codes2[10]={0b00000011,0b00000000,0b00000101,0b00000100,0b00000110,0b00000110,0b00000111,0b00000000,0b00000111,0b00000110};
unsigned char data[2]={0x00,0x00};
unsigned char data2[2]={0x00,0x00};
unsigned char counter=0;
void pause (unsigned int a)
{ unsigned int i;
for (i=a;i>0;i--)
;
}
void init_timer (void)
{
TIMSK=(1<<TOIE0); //Enable timer overflow interrupt
TCCR0=(0<<CS00)|(1<<CS01)|(0<<CS02); //Prescaller = 8
TCCR1A=0;
TCCR1B=_BV(ICNC1) | _BV(CS12) | _BV(CS11) | _BV(CS10); // Вход T1
}
void convert_data (unsigned int x)
{
unsigned int temp,res;
temp=x;
res=temp/1000; //Calculate 1000-s
data[1]=codes1[res];
data2[1]=codes2[res];
temp=temp-res*1000;
res=temp/100; //Calculate 100-s
data[0]=codes1[res];
data2[0]=codes2[res];
}
ISR (TIMER0_OVF_vect)
{
//PORTB=0xff;
//PORTC=0xff;
PORTC=~_BV(counter); //Enable digit
PORTB=~data[counter]; //Write code
PORTC=~data2[counter]; //Write code
counter=(counter+1)%4; //Increment digit counter
//TCNT0=0x00; //Clear timer
}
int main(void)
{
uint16_t x=0;
DDRD =0b11011111;
PORTD =0b11011111;
DDRB =0b11111111;
PORTB =0b11111111;
DDRC =0b11111111;
PORTC =0b11111111;
pause(1000); //Settle pause
init_timer(); //Init timer
sei(); //Interrupt enable
while(1)
{
convert_data(x); //Conver data to codes
if (x<9999) x=x+1; //Increment data
else x=0;
pause(30000);
};
return 1;
}
не выводит совсем ничего, только если немного закаротить +5 и землю... выдод на сегменты: A - PB2, B - PB3, C - PB4, D - PB5, E - PC0, F - PC1, G - PC2, 1DP - PC3, 2DP - PC4.
Ded140:код ....
а схема плата фото к чему это?
если бездумно компилировать для arduino uno
видим что код нерабочий
вдумываться что за глупости там с таймерами лень
sketch_nov29b.ino: In function 'void init_timer()':
sketch_nov29b:17: error: 'TIMSK' was not declared in this scope
sketch_nov29b:18: error: 'TCCR0' was not declared in this scope
выкинуть и взять для нужной схемы рабочий код
из сегодняшнего http://art1.by/0arduino/video/BH1750.wmv
|
офлайн
Protez1999
Senior Member
Автор темы
|
||
9978 |
18 лет на сайте Город:
|
|
|
|
Делал часы могу скинуть код. думаю с ненужных букв как нибудь наколупаите на диоды тахометра
Protez1999:Делал часы могу скинуть код. думаю с ненужных букв как нибудь наколупаите на диоды тахометра
скинь. посмотрим что можно сделать)))
Ded140:..скинь. посмотрим что можно сделать)))
А схему скинуть слабо?
Кода для ardu-инки хочется? Да пожалуйсто. Для индикаторчика:
#include "temperature.h"
#include "ultralcd.h"
#ifdef ULTRA_LCD
#include "Marlin.h"
#include "language.h"
#include "cardreader.h"
#include "temperature.h"
#include "stepper.h"
#include "ConfigurationStore.h"
int8_t encoderDiff; /* encoderDiff is updated from interrupt context and added to encoderPosition every LCD update */
/* Configuration settings */
int plaPreheatHotendTemp;
int plaPreheatHPBTemp;
int plaPreheatFanSpeed;
int absPreheatHotendTemp;
int absPreheatHPBTemp;
int absPreheatFanSpeed;
#ifdef ULTIPANEL
static float manual_feedrate[] = MANUAL_FEEDRATE;
#endif // ULTIPANEL
/* !Configuration settings */
//Function pointer to menu functions.
typedef void (*menuFunc_t)();
uint8_t lcd_status_message_level;
char lcd_status_message[LCD_WIDTH+1] = WELCOME_MSG;
#ifdef DOGLCD
#include "dogm_lcd_implementation.h"
#else
#include "ultralcd_implementation_hitachi_HD44780.h"
#endif
/** forward declarations **/
void copy_and_scalePID_i();
void copy_and_scalePID_d();
/* Different menus */
static void lcd_status_screen();
#ifdef ULTIPANEL
extern bool powersupply;
static void lcd_main_menu();
static void lcd_tune_menu();
static void lcd_prepare_menu();
static void lcd_move_menu();
static void lcd_control_menu();
static void lcd_control_temperature_menu();
static void lcd_control_temperature_preheat_pla_settings_menu();
static void lcd_control_temperature_preheat_abs_settings_menu();
static void lcd_control_motion_menu();
#ifdef DOGLCD
static void lcd_set_contrast();
#endif
static void lcd_control_retract_menu();
static void lcd_sdcard_menu();
static void lcd_quick_feedback();//Cause an LCD refresh, and give the user visual or audible feedback that something has happened
/* Different types of actions that can be used in menu items. */
static void menu_action_back(menuFunc_t data);
static void menu_action_submenu(menuFunc_t data);
static void menu_action_gcode(const char* pgcode);
static void menu_action_function(menuFunc_t data);
static void menu_action_sdfile(const char* filename, char* longFilename);
static void menu_action_sddirectory(const char* filename, char* longFilename);
static void menu_action_setting_edit_bool(const char* pstr, bool* ptr);
static void menu_action_setting_edit_int3(const char* pstr, int* ptr, int minValue, int maxValue);
static void menu_action_setting_edit_float3(const char* pstr, float* ptr, float minValue, float maxValue);
static void menu_action_setting_edit_float32(const char* pstr, float* ptr, float minValue, float maxValue);
static void menu_action_setting_edit_float5(const char* pstr, float* ptr, float minValue, float maxValue);
static void menu_action_setting_edit_float51(const char* pstr, float* ptr, float minValue, float maxValue);
static void menu_action_setting_edit_float52(const char* pstr, float* ptr, float minValue, float maxValue);
static void menu_action_setting_edit_long5(const char* pstr, unsigned long* ptr, unsigned long minValue, unsigned long maxValue);
static void menu_action_setting_edit_callback_bool(const char* pstr, bool* ptr, menuFunc_t callbackFunc);
static void menu_action_setting_edit_callback_int3(const char* pstr, int* ptr, int minValue, int maxValue, menuFunc_t callbackFunc);
static void menu_action_setting_edit_callback_float3(const char* pstr, float* ptr, float minValue, float maxValue, menuFunc_t callbackFunc);
static void menu_action_setting_edit_callback_float32(const char* pstr, float* ptr, float minValue, float maxValue, menuFunc_t callbackFunc);
static void menu_action_setting_edit_callback_float5(const char* pstr, float* ptr, float minValue, float maxValue, menuFunc_t callbackFunc);
static void menu_action_setting_edit_callback_float51(const char* pstr, float* ptr, float minValue, float maxValue, menuFunc_t callbackFunc);
static void menu_action_setting_edit_callback_float52(const char* pstr, float* ptr, float minValue, float maxValue, menuFunc_t callbackFunc);
static void menu_action_setting_edit_callback_long5(const char* pstr, unsigned long* ptr, unsigned long minValue, unsigned long maxValue, menuFunc_t callbackFunc);
#define ENCODER_FEEDRATE_DEADZONE 10
#if !defined(LCD_I2C_VIKI)
#ifndef ENCODER_STEPS_PER_MENU_ITEM
#define ENCODER_STEPS_PER_MENU_ITEM 5
#endif
#ifndef ENCODER_PULSES_PER_STEP
#define ENCODER_PULSES_PER_STEP 1
#endif
#else
#ifndef ENCODER_STEPS_PER_MENU_ITEM
#define ENCODER_STEPS_PER_MENU_ITEM 2 // VIKI LCD rotary encoder uses a different number of steps per rotation
#endif
#ifndef ENCODER_PULSES_PER_STEP
#define ENCODER_PULSES_PER_STEP 1
#endif
#endif
/* Helper macros for menus */
#define START_MENU() do { \
if (encoderPosition > 0x8000) encoderPosition = 0; \
if (encoderPosition / ENCODER_STEPS_PER_MENU_ITEM < currentMenuViewOffset) currentMenuViewOffset = encoderPosition / ENCODER_STEPS_PER_MENU_ITEM;\
uint8_t _lineNr = currentMenuViewOffset, _menuItemNr; \
bool wasClicked = LCD_CLICKED;\
for(uint8_t _drawLineNr = 0; _drawLineNr < LCD_HEIGHT; _drawLineNr++, _lineNr++) { \
_menuItemNr = 0;
#define MENU_ITEM(type, label, args...) do { \
if (_menuItemNr == _lineNr) { \
if (lcdDrawUpdate) { \
const char* _label_pstr = PSTR(label); \
if ((encoderPosition / ENCODER_STEPS_PER_MENU_ITEM) == _menuItemNr) { \
lcd_implementation_drawmenu_ ## type ## _selected (_drawLineNr, _label_pstr , ## args ); \
}else{\
lcd_implementation_drawmenu_ ## type (_drawLineNr, _label_pstr , ## args ); \
}\
}\
if (wasClicked && (encoderPosition / ENCODER_STEPS_PER_MENU_ITEM) == _menuItemNr) {\
lcd_quick_feedback(); \
menu_action_ ## type ( args ); \
return;\
}\
}\
_menuItemNr++;\
} while(0)
#define MENU_ITEM_DUMMY() do { _menuItemNr++; } while(0)
#define MENU_ITEM_EDIT(type, label, args...) MENU_ITEM(setting_edit_ ## type, label, PSTR(label) , ## args )
#define MENU_ITEM_EDIT_CALLBACK(type, label, args...) MENU_ITEM(setting_edit_callback_ ## type, label, PSTR(label) , ## args )
#define END_MENU() \
if (encoderPosition / ENCODER_STEPS_PER_MENU_ITEM >= _menuItemNr) encoderPosition = _menuItemNr * ENCODER_STEPS_PER_MENU_ITEM - 1; \
if ((uint8_t)(encoderPosition / ENCODER_STEPS_PER_MENU_ITEM) >= currentMenuViewOffset + LCD_HEIGHT) { currentMenuViewOffset = (encoderPosition / ENCODER_STEPS_PER_MENU_ITEM) - LCD_HEIGHT + 1; lcdDrawUpdate = 1; _lineNr = currentMenuViewOffset - 1; _drawLineNr = -1; } \
} } while(0)
/** Used variables to keep track of the menu */
#ifndef REPRAPWORLD_KEYPAD
volatile uint8_t buttons;//Contains the bits of the currently pressed buttons.
#else
volatile uint8_t buttons_reprapworld_keypad; // to store the reprapworld_keypad shift register values
#endif
#ifdef LCD_HAS_SLOW_BUTTONS
volatile uint8_t slow_buttons;//Contains the bits of the currently pressed buttons.
#endif
uint8_t currentMenuViewOffset; /* scroll offset in the current menu */
uint32_t blocking_enc;
uint8_t lastEncoderBits;
uint32_t encoderPosition;
#if (SDCARDDETECT > 0)
bool lcd_oldcardstatus;
#endif
#endif//ULTIPANEL
menuFunc_t currentMenu = lcd_status_screen; /* function pointer to the currently active menu */
uint32_t lcd_next_update_millis;
uint8_t lcd_status_update_delay;
uint8_t lcdDrawUpdate = 2; /* Set to none-zero when the LCD needs to draw, decreased after every draw. Set to 2 in LCD routines so the LCD gets at least 1 full redraw (first redraw is partial) */
//prevMenu and prevEncoderPosition are used to store the previous menu location when editing settings.
menuFunc_t prevMenu = NULL;
uint16_t prevEncoderPosition;
//Variables used when editing values.
const char* editLabel;
void* editValue;
int32_t minEditValue, maxEditValue;
menuFunc_t callbackFunc;
// place-holders for Ki and Kd edits
float raw_Ki, raw_Kd;
/* Main status screen. It's up to the implementation specific part to show what is needed. As this is very display dependent */
static void lcd_status_screen()
{
if (lcd_status_update_delay)
lcd_status_update_delay--;
else
lcdDrawUpdate = 1;
if (lcdDrawUpdate)
{
lcd_implementation_status_screen();
lcd_status_update_delay = 10; /* redraw the main screen every second. This is easier then trying keep track of all things that change on the screen */
}
#ifdef ULTIPANEL
if (LCD_CLICKED)
{
currentMenu = lcd_main_menu;
encoderPosition = 0;
lcd_quick_feedback();
}
// Dead zone at 100% feedrate
if ((feedmultiply < 100 && (feedmultiply + int(encoderPosition)) > 100) ||
(feedmultiply > 100 && (feedmultiply + int(encoderPosition)) < 100))
{
encoderPosition = 0;
feedmultiply = 100;
}
if (feedmultiply == 100 && int(encoderPosition) > ENCODER_FEEDRATE_DEADZONE)
{
feedmultiply += int(encoderPosition) - ENCODER_FEEDRATE_DEADZONE;
encoderPosition = 0;
}
else if (feedmultiply == 100 && int(encoderPosition) < -ENCODER_FEEDRATE_DEADZONE)
{
feedmultiply += int(encoderPosition) + ENCODER_FEEDRATE_DEADZONE;
encoderPosition = 0;
}
else if (feedmultiply != 100)
{
feedmultiply += int(encoderPosition);
encoderPosition = 0;
}
if (feedmultiply < 10)
feedmultiply = 10;
if (feedmultiply > 999)
feedmultiply = 999;
#endif//ULTIPANEL
}
#ifdef ULTIPANEL
static void lcd_return_to_status()
{
encoderPosition = 0;
currentMenu = lcd_status_screen;
}
static void lcd_sdcard_pause()
{
card.pauseSDPrint();
}
static void lcd_sdcard_resume()
{
card.startFileprint();
}
static void lcd_sdcard_stop()
{
card.sdprinting = false;
card.closefile();
quickStop();
if(SD_FINISHED_STEPPERRELEASE)
{
enquecommand_P(PSTR(SD_FINISHED_RELEASECOMMAND));
}
autotempShutdown();
}
/* Menu implementation */
static void lcd_main_menu()
{
START_MENU();
MENU_ITEM(back, MSG_WATCH, lcd_status_screen);
if (movesplanned() || IS_SD_PRINTING)
{
MENU_ITEM(submenu, MSG_TUNE, lcd_tune_menu);
}else{
MENU_ITEM(submenu, MSG_PREPARE, lcd_prepare_menu);
}
MENU_ITEM(submenu, MSG_CONTROL, lcd_control_menu);
#ifdef SDSUPPORT
if (card.cardOK)
{
if (card.isFileOpen())
{
if (card.sdprinting)
MENU_ITEM(function, MSG_PAUSE_PRINT, lcd_sdcard_pause);
else
MENU_ITEM(function, MSG_RESUME_PRINT, lcd_sdcard_resume);
MENU_ITEM(function, MSG_STOP_PRINT, lcd_sdcard_stop);
}else{
MENU_ITEM(submenu, MSG_CARD_MENU, lcd_sdcard_menu);
#if SDCARDDETECT < 1
MENU_ITEM(gcode, MSG_CNG_SDCARD, PSTR("M21")); // SD-card changed by user
#endif
}
}else{
MENU_ITEM(submenu, MSG_NO_CARD, lcd_sdcard_menu);
#if SDCARDDETECT < 1
MENU_ITEM(gcode, MSG_INIT_SDCARD, PSTR("M21")); // Manually initialize the SD-card via user interface
#endif
}
#endif
END_MENU();
}
#ifdef SDSUPPORT
static void lcd_autostart_sd()
{
card.lastnr=0;
card.setroot();
card.checkautostart(true);
}
#endif
void lcd_preheat_pla()
{
setTargetHotend0(plaPreheatHotendTemp);
setTargetHotend1(plaPreheatHotendTemp);
setTargetHotend2(plaPreheatHotendTemp);
setTargetBed(plaPreheatHPBTemp);
fanSpeed = plaPreheatFanSpeed;
lcd_return_to_status();
setWatch(); // heater sanity check timer
}
void lcd_preheat_abs()
{
setTargetHotend0(absPreheatHotendTemp);
setTargetHotend1(absPreheatHotendTemp);
setTargetHotend2(absPreheatHotendTemp);
setTargetBed(absPreheatHPBTemp);
fanSpeed = absPreheatFanSpeed;
lcd_return_to_status();
setWatch(); // heater sanity check timer
}
static void lcd_cooldown()
{
setTargetHotend0(0);
setTargetHotend1(0);
setTargetHotend2(0);
setTargetBed(0);
lcd_return_to_status();
}
#ifdef BABYSTEPPING
static void lcd_babystep_x()
{
if (encoderPosition != 0)
{
babystepsTodo[X_AXIS]+=(int)encoderPosition;
encoderPosition=0;
lcdDrawUpdate = 1;
}
if (lcdDrawUpdate)
{
lcd_implementation_drawedit(PSTR(MSG_BABYSTEPPING_X),"");
}
if (LCD_CLICKED)
{
lcd_quick_feedback();
currentMenu = lcd_tune_menu;
encoderPosition = 0;
}
}
static void lcd_babystep_y()
{
if (encoderPosition != 0)
{
babystepsTodo[Y_AXIS]+=(int)encoderPosition;
encoderPosition=0;
lcdDrawUpdate = 1;
}
if (lcdDrawUpdate)
{
lcd_implementation_drawedit(PSTR(MSG_BABYSTEPPING_Y),"");
}
if (LCD_CLICKED)
{
lcd_quick_feedback();
currentMenu = lcd_tune_menu;
encoderPosition = 0;
}
}
static void lcd_babystep_z()
{
if (encoderPosition != 0)
{
babystepsTodo[Z_AXIS]+=BABYSTEP_Z_MULTIPLICATOR*(int)encoderPosition;
encoderPosition=0;
lcdDrawUpdate = 1;
}
if (lcdDrawUpdate)
{
lcd_implementation_drawedit(PSTR(MSG_BABYSTEPPING_Z),"");
}
if (LCD_CLICKED)
{
lcd_quick_feedback();
currentMenu = lcd_tune_menu;
encoderPosition = 0;
}
}
#endif //BABYSTEPPING
static void lcd_tune_menu()
{
START_MENU();
MENU_ITEM(back, MSG_MAIN, lcd_main_menu);
MENU_ITEM_EDIT(int3, MSG_SPEED, &feedmultiply, 10, 999);
MENU_ITEM_EDIT(int3, MSG_NOZZLE, &target_temperature[0], 0, HEATER_0_MAXTEMP - 15);
#if TEMP_SENSOR_1 != 0
MENU_ITEM_EDIT(int3, MSG_NOZZLE1, &target_temperature[1], 0, HEATER_1_MAXTEMP - 15);
#endif
#if TEMP_SENSOR_2 != 0
MENU_ITEM_EDIT(int3, MSG_NOZZLE2, &target_temperature[2], 0, HEATER_2_MAXTEMP - 15);
#endif
#if TEMP_SENSOR_BED != 0
MENU_ITEM_EDIT(int3, MSG_BED, &target_temperature_bed, 0, BED_MAXTEMP - 15);
#endif
MENU_ITEM_EDIT(int3, MSG_FAN_SPEED, &fanSpeed, 0, 255);
MENU_ITEM_EDIT(int3, MSG_FLOW, &extrudemultiply, 10, 999);
#ifdef BABYSTEPPING
#ifdef BABYSTEP_XY
MENU_ITEM(submenu, MSG_BABYSTEP_X, lcd_babystep_x);
MENU_ITEM(submenu, MSG_BABYSTEP_Y, lcd_babystep_y);
#endif //BABYSTEP_XY
MENU_ITEM(submenu, MSG_BABYSTEP_Z, lcd_babystep_z);
#endif
#ifdef FILAMENTCHANGEENABLE
MENU_ITEM(gcode, MSG_FILAMENTCHANGE, PSTR("M600"));
#endif
END_MENU();
}
static void lcd_prepare_menu()
{
START_MENU();
MENU_ITEM(back, MSG_MAIN, lcd_main_menu);
#ifdef SDSUPPORT
#ifdef MENU_ADDAUTOSTART
MENU_ITEM(function, MSG_AUTOSTART, lcd_autostart_sd);
#endif
#endif
MENU_ITEM(gcode, MSG_DISABLE_STEPPERS, PSTR("M84"));
MENU_ITEM(gcode, MSG_AUTO_HOME, PSTR("G28"));
//MENU_ITEM(gcode, MSG_SET_ORIGIN, PSTR("G92 X0 Y0 Z0"));
MENU_ITEM(function, MSG_PREHEAT_PLA, lcd_preheat_pla);
MENU_ITEM(function, MSG_PREHEAT_ABS, lcd_preheat_abs);
MENU_ITEM(function, MSG_COOLDOWN, lcd_cooldown);
#if PS_ON_PIN > -1
if (powersupply)
{
MENU_ITEM(gcode, MSG_SWITCH_PS_OFF, PSTR("M81"));
}else{
MENU_ITEM(gcode, MSG_SWITCH_PS_ON, PSTR("M80"));
}
#endif
MENU_ITEM(submenu, MSG_MOVE_AXIS, lcd_move_menu);
END_MENU();
}
float move_menu_scale;
static void lcd_move_menu_axis();
static void lcd_move_x()
{
if (encoderPosition != 0)
{
refresh_cmd_timeout();
current_position[X_AXIS] += float((int)encoderPosition) * move_menu_scale;
if (min_software_endstops && current_position[X_AXIS] < X_MIN_POS)
current_position[X_AXIS] = X_MIN_POS;
if (max_software_endstops && current_position[X_AXIS] > X_MAX_POS)
current_position[X_AXIS] = X_MAX_POS;
encoderPosition = 0;
#ifdef DELTA
calculate_delta(current_position);
plan_buffer_line(delta[X_AXIS], delta[Y_AXIS], delta[Z_AXIS], current_position[E_AXIS], manual_feedrate[X_AXIS]/60, active_extruder);
#else
plan_buffer_line(current_position[X_AXIS], current_position[Y_AXIS], current_position[Z_AXIS], current_position[E_AXIS], manual_feedrate[X_AXIS]/60, active_extruder);
#endif
lcdDrawUpdate = 1;
}
if (lcdDrawUpdate)
{
lcd_implementation_drawedit(PSTR("X"), ftostr31(current_position[X_AXIS]));
}
if (LCD_CLICKED)
{
lcd_quick_feedback();
currentMenu = lcd_move_menu_axis;
encoderPosition = 0;
}
}
static void lcd_move_y()
{
if (encoderPosition != 0)
{
refresh_cmd_timeout();
current_position[Y_AXIS] += float((int)encoderPosition) * move_menu_scale;
if (min_software_endstops && current_position[Y_AXIS] < Y_MIN_POS)
current_position[Y_AXIS] = Y_MIN_POS;
if (max_software_endstops && current_position[Y_AXIS] > Y_MAX_POS)
current_position[Y_AXIS] = Y_MAX_POS;
encoderPosition = 0;
#ifdef DELTA
calculate_delta(current_position);
plan_buffer_line(delta[X_AXIS], delta[Y_AXIS], delta[Z_AXIS], current_position[E_AXIS], manual_feedrate[Y_AXIS]/60, active_extruder);
#else
plan_buffer_line(current_position[X_AXIS], current_position[Y_AXIS], current_position[Z_AXIS], current_position[E_AXIS], manual_feedrate[Y_AXIS]/60, active_extruder);
#endif
lcdDrawUpdate = 1;
}
if (lcdDrawUpdate)
{
lcd_implementation_drawedit(PSTR("Y"), ftostr31(current_position[Y_AXIS]));
}
if (LCD_CLICKED)
{
lcd_quick_feedback();
currentMenu = lcd_move_menu_axis;
encoderPosition = 0;
}
}
static void lcd_move_z()
{
if (encoderPosition != 0)
{
refresh_cmd_timeout();
current_position[Z_AXIS] += float((int)encoderPosition) * move_menu_scale;
if (min_software_endstops && current_position[Z_AXIS] < Z_MIN_POS)
current_position[Z_AXIS] = Z_MIN_POS;
if (max_software_endstops && current_position[Z_AXIS] > Z_MAX_POS)
current_position[Z_AXIS] = Z_MAX_POS;
encoderPosition = 0;
#ifdef DELTA
calculate_delta(current_position);
plan_buffer_line(delta[X_AXIS], delta[Y_AXIS], delta[Z_AXIS], current_position[E_AXIS], manual_feedrate[Z_AXIS]/60, active_extruder);
#else
plan_buffer_line(current_position[X_AXIS], current_position[Y_AXIS], current_position[Z_AXIS], current_position[E_AXIS], manual_feedrate[Z_AXIS]/60, active_extruder);
#endif
lcdDrawUpdate = 1;
}
if (lcdDrawUpdate)
{
lcd_implementation_drawedit(PSTR("Z"), ftostr31(current_position[Z_AXIS]));
}
if (LCD_CLICKED)
{
lcd_quick_feedback();
currentMenu = lcd_move_menu_axis;
encoderPosition = 0;
}
}
static void lcd_move_e()
{
if (encoderPosition != 0)
{
current_position[E_AXIS] += float((int)encoderPosition) * move_menu_scale;
encoderPosition = 0;
#ifdef DELTA
calculate_delta(current_position);
plan_buffer_line(delta[X_AXIS], delta[Y_AXIS], delta[Z_AXIS], current_position[E_AXIS], manual_feedrate[E_AXIS]/60, active_extruder);
#else
plan_buffer_line(current_position[X_AXIS], current_position[Y_AXIS], current_position[Z_AXIS], current_position[E_AXIS], manual_feedrate[E_AXIS]/60, active_extruder);
#endif
lcdDrawUpdate = 1;
}
if (lcdDrawUpdate)
{
lcd_implementation_drawedit(PSTR("Extruder"), ftostr31(current_position[E_AXIS]));
}
if (LCD_CLICKED)
{
lcd_quick_feedback();
currentMenu = lcd_move_menu_axis;
encoderPosition = 0;
}
}
static void lcd_move_menu_axis()
{
START_MENU();
MENU_ITEM(back, MSG_MOVE_AXIS, lcd_move_menu);
MENU_ITEM(submenu, MSG_MOVE_X, lcd_move_x);
MENU_ITEM(submenu, MSG_MOVE_Y, lcd_move_y);
if (move_menu_scale < 10.0)
{
MENU_ITEM(submenu, MSG_MOVE_Z, lcd_move_z);
MENU_ITEM(submenu, MSG_MOVE_E, lcd_move_e);
}
END_MENU();
}
static void lcd_move_menu_10mm()
{
move_menu_scale = 10.0;
lcd_move_menu_axis();
}
static void lcd_move_menu_1mm()
{
move_menu_scale = 1.0;
lcd_move_menu_axis();
}
static void lcd_move_menu_01mm()
{
move_menu_scale = 0.1;
lcd_move_menu_axis();
}
static void lcd_move_menu()
{
START_MENU();
MENU_ITEM(back, MSG_PREPARE, lcd_prepare_menu);
MENU_ITEM(submenu, MSG_MOVE_10MM, lcd_move_menu_10mm);
MENU_ITEM(submenu, MSG_MOVE_1MM, lcd_move_menu_1mm);
MENU_ITEM(submenu, MSG_MOVE_01MM, lcd_move_menu_01mm);
//TODO:X,Y,Z,E
END_MENU();
}
static void lcd_control_menu()
{
START_MENU();
MENU_ITEM(back, MSG_MAIN, lcd_main_menu);
MENU_ITEM(submenu, MSG_TEMPERATURE, lcd_control_temperature_menu);
MENU_ITEM(submenu, MSG_MOTION, lcd_control_motion_menu);
#ifdef DOGLCD
// MENU_ITEM_EDIT(int3, MSG_CONTRAST, &lcd_contrast, 0, 63);
MENU_ITEM(submenu, MSG_CONTRAST, lcd_set_contrast);
#endif
#ifdef FWRETRACT
MENU_ITEM(submenu, MSG_RETRACT, lcd_control_retract_menu);
#endif
#ifdef EEPROM_SETTINGS
MENU_ITEM(function, MSG_STORE_EPROM, Config_StoreSettings);
MENU_ITEM(function, MSG_LOAD_EPROM, Config_RetrieveSettings);
#endif
MENU_ITEM(function, MSG_RESTORE_FAILSAFE, Config_ResetDefault);
END_MENU();
}
static void lcd_control_temperature_menu()
{
#ifdef PIDTEMP
// set up temp variables - undo the default scaling
raw_Ki = unscalePID_i(Ki);
raw_Kd = unscalePID_d(Kd);
#endif
START_MENU();
MENU_ITEM(back, MSG_CONTROL, lcd_control_menu);
MENU_ITEM_EDIT(int3, MSG_NOZZLE, &target_temperature[0], 0, HEATER_0_MAXTEMP - 15);
#if TEMP_SENSOR_1 != 0
MENU_ITEM_EDIT(int3, MSG_NOZZLE1, &target_temperature[1], 0, HEATER_1_MAXTEMP - 15);
#endif
#if TEMP_SENSOR_2 != 0
MENU_ITEM_EDIT(int3, MSG_NOZZLE2, &target_temperature[2], 0, HEATER_2_MAXTEMP - 15);
#endif
#if TEMP_SENSOR_BED != 0
MENU_ITEM_EDIT(int3, MSG_BED, &target_temperature_bed, 0, BED_MAXTEMP - 15);
#endif
MENU_ITEM_EDIT(int3, MSG_FAN_SPEED, &fanSpeed, 0, 255);
#ifdef AUTOTEMP
MENU_ITEM_EDIT(bool, MSG_AUTOTEMP, &autotemp_enabled);
MENU_ITEM_EDIT(float3, MSG_MIN, &autotemp_min, 0, HEATER_0_MAXTEMP - 15);
MENU_ITEM_EDIT(float3, MSG_MAX, &autotemp_max, 0, HEATER_0_MAXTEMP - 15);
MENU_ITEM_EDIT(float32, MSG_FACTOR, &autotemp_factor, 0.0, 1.0);
#endif
#ifdef PIDTEMP
MENU_ITEM_EDIT(float52, MSG_PID_P, &Kp, 1, 9990);
// i is typically a small value so allows values below 1
MENU_ITEM_EDIT_CALLBACK(float52, MSG_PID_I, &raw_Ki, 0.01, 9990, copy_and_scalePID_i);
MENU_ITEM_EDIT_CALLBACK(float52, MSG_PID_D, &raw_Kd, 1, 9990, copy_and_scalePID_d);
# ifdef PID_ADD_EXTRUSION_RATE
MENU_ITEM_EDIT(float3, MSG_PID_C, &Kc, 1, 9990);
# endif//PID_ADD_EXTRUSION_RATE
#endif//PIDTEMP
MENU_ITEM(submenu, MSG_PREHEAT_PLA_SETTINGS, lcd_control_temperature_preheat_pla_settings_menu);
MENU_ITEM(submenu, MSG_PREHEAT_ABS_SETTINGS, lcd_control_temperature_preheat_abs_settings_menu);
END_MENU();
}
static void lcd_control_temperature_preheat_pla_settings_menu()
{
START_MENU();
MENU_ITEM(back, MSG_TEMPERATURE, lcd_control_temperature_menu);
MENU_ITEM_EDIT(int3, MSG_FAN_SPEED, &plaPreheatFanSpeed, 0, 255);
MENU_ITEM_EDIT(int3, MSG_NOZZLE, &plaPreheatHotendTemp, 0, HEATER_0_MAXTEMP - 15);
#if TEMP_SENSOR_BED != 0
MENU_ITEM_EDIT(int3, MSG_BED, &plaPreheatHPBTemp, 0, BED_MAXTEMP - 15);
#endif
#ifdef EEPROM_SETTINGS
MENU_ITEM(function, MSG_STORE_EPROM, Config_StoreSettings);
#endif
END_MENU();
}
static void lcd_control_temperature_preheat_abs_settings_menu()
{
START_MENU();
MENU_ITEM(back, MSG_TEMPERATURE, lcd_control_temperature_menu);
MENU_ITEM_EDIT(int3, MSG_FAN_SPEED, &absPreheatFanSpeed, 0, 255);
MENU_ITEM_EDIT(int3, MSG_NOZZLE, &absPreheatHotendTemp, 0, HEATER_0_MAXTEMP - 15);
#if TEMP_SENSOR_BED != 0
MENU_ITEM_EDIT(int3, MSG_BED, &absPreheatHPBTemp, 0, BED_MAXTEMP - 15);
#endif
#ifdef EEPROM_SETTINGS
MENU_ITEM(function, MSG_STORE_EPROM, Config_StoreSettings);
#endif
END_MENU();
}
static void lcd_control_motion_menu()
{
START_MENU();
MENU_ITEM(back, MSG_CONTROL, lcd_control_menu);
#ifdef ENABLE_AUTO_BED_LEVELING
MENU_ITEM_EDIT(float32, MSG_ZPROBE_ZOFFSET, &zprobe_zoffset, 0.5, 50);
#endif
MENU_ITEM_EDIT(float5, MSG_ACC, &acceleration, 500, 99000);
MENU_ITEM_EDIT(float3, MSG_VXY_JERK, &max_xy_jerk, 1, 990);
MENU_ITEM_EDIT(float52, MSG_VZ_JERK, &max_z_jerk, 0.1, 990);
MENU_ITEM_EDIT(float3, MSG_VE_JERK, &max_e_jerk, 1, 990);
MENU_ITEM_EDIT(float3, MSG_VMAX MSG_X, &max_feedrate[X_AXIS], 1, 999);
MENU_ITEM_EDIT(float3, MSG_VMAX MSG_Y, &max_feedrate[Y_AXIS], 1, 999);
MENU_ITEM_EDIT(float3, MSG_VMAX MSG_Z, &max_feedrate[Z_AXIS], 1, 999);
MENU_ITEM_EDIT(float3, MSG_VMAX MSG_E, &max_feedrate[E_AXIS], 1, 999);
MENU_ITEM_EDIT(float3, MSG_VMIN, &minimumfeedrate, 0, 999);
MENU_ITEM_EDIT(float3, MSG_VTRAV_MIN, &mintravelfeedrate, 0, 999);
MENU_ITEM_EDIT_CALLBACK(long5, MSG_AMAX MSG_X, &max_acceleration_units_per_sq_second[X_AXIS], 100, 99000, reset_acceleration_rates);
MENU_ITEM_EDIT_CALLBACK(long5, MSG_AMAX MSG_Y, &max_acceleration_units_per_sq_second[Y_AXIS], 100, 99000, reset_acceleration_rates);
MENU_ITEM_EDIT_CALLBACK(long5, MSG_AMAX MSG_Z, &max_acceleration_units_per_sq_second[Z_AXIS], 100, 99000, reset_acceleration_rates);
MENU_ITEM_EDIT_CALLBACK(long5, MSG_AMAX MSG_E, &max_acceleration_units_per_sq_second[E_AXIS], 100, 99000, reset_acceleration_rates);
MENU_ITEM_EDIT(float5, MSG_A_RETRACT, &retract_acceleration, 100, 99000);
MENU_ITEM_EDIT(float52, MSG_XSTEPS, &axis_steps_per_unit[X_AXIS], 5, 9999);
MENU_ITEM_EDIT(float52, MSG_YSTEPS, &axis_steps_per_unit[Y_AXIS], 5, 9999);
MENU_ITEM_EDIT(float51, MSG_ZSTEPS, &axis_steps_per_unit[Z_AXIS], 5, 9999);
MENU_ITEM_EDIT(float51, MSG_ESTEPS, &axis_steps_per_unit[E_AXIS], 5, 9999);
#ifdef ABORT_ON_ENDSTOP_HIT_FEATURE_ENABLED
MENU_ITEM_EDIT(bool, MSG_ENDSTOP_ABORT, &abort_on_endstop_hit);
#endif
END_MENU();
}
#ifdef DOGLCD
static void lcd_set_contrast()
{
if (encoderPosition != 0)
{
lcd_contrast -= encoderPosition;
if (lcd_contrast < 0) lcd_contrast = 0;
else if (lcd_contrast > 63) lcd_contrast = 63;
encoderPosition = 0;
lcdDrawUpdate = 1;
u8g.setContrast(lcd_contrast);
}
if (lcdDrawUpdate)
{
lcd_implementation_drawedit(PSTR(MSG_CONTRAST), itostr2(lcd_contrast));
}
if (LCD_CLICKED)
{
lcd_quick_feedback();
currentMenu = lcd_control_menu;
encoderPosition = 0;
}
}
#endif
#ifdef FWRETRACT
static void lcd_control_retract_menu()
{
START_MENU();
MENU_ITEM(back, MSG_CONTROL, lcd_control_menu);
MENU_ITEM_EDIT(bool, MSG_AUTORETRACT, &autoretract_enabled);
MENU_ITEM_EDIT(float52, MSG_CONTROL_RETRACT, &retract_length, 0, 100);
MENU_ITEM_EDIT(float3, MSG_CONTROL_RETRACTF, &retract_feedrate, 1, 999);
MENU_ITEM_EDIT(float52, MSG_CONTROL_RETRACT_ZLIFT, &retract_zlift, 0, 999);
MENU_ITEM_EDIT(float52, MSG_CONTROL_RETRACT_RECOVER, &retract_recover_length, 0, 100);
MENU_ITEM_EDIT(float3, MSG_CONTROL_RETRACT_RECOVERF, &retract_recover_feedrate, 1, 999);
END_MENU();
}
#endif
#if SDCARDDETECT == -1
static void lcd_sd_refresh()
{
card.initsd();
currentMenuViewOffset = 0;
}
#endif
static void lcd_sd_updir()
{
card.updir();
currentMenuViewOffset = 0;
}
void lcd_sdcard_menu()
{
if (lcdDrawUpdate == 0 && LCD_CLICKED == 0)
return; // nothing to do (so don't thrash the SD card)
uint16_t fileCnt = card.getnrfilenames();
START_MENU();
MENU_ITEM(back, MSG_MAIN, lcd_main_menu);
card.getWorkDirName();
if(card.filename[0]=='/')
{
#if SDCARDDETECT == -1
MENU_ITEM(function, LCD_STR_REFRESH MSG_REFRESH, lcd_sd_refresh);
#endif
}else{
MENU_ITEM(function, LCD_STR_FOLDER "..", lcd_sd_updir);
}
for(uint16_t i=0;i<fileCnt;i++)
{
if (_menuItemNr == _lineNr)
{
#ifndef SDCARD_RATHERRECENTFIRST
card.getfilename(i);
#else
card.getfilename(fileCnt-1-i);
#endif
if (card.filenameIsDir)
{
MENU_ITEM(sddirectory, MSG_CARD_MENU, card.filename, card.longFilename);
}else{
MENU_ITEM(sdfile, MSG_CARD_MENU, card.filename, card.longFilename);
}
}else{
MENU_ITEM_DUMMY();
}
}
END_MENU();
}
#define menu_edit_type(_type, _name, _strFunc, scale) \
void menu_edit_ ## _name () \
{ \
if ((int32_t)encoderPosition < minEditValue) \
encoderPosition = minEditValue; \
if ((int32_t)encoderPosition > maxEditValue) \
encoderPosition = maxEditValue; \
if (lcdDrawUpdate) \
lcd_implementation_drawedit(editLabel, _strFunc(((_type)encoderPosition) / scale)); \
if (LCD_CLICKED) \
{ \
*((_type*)editValue) = ((_type)encoderPosition) / scale; \
lcd_quick_feedback(); \
currentMenu = prevMenu; \
encoderPosition = prevEncoderPosition; \
} \
} \
void menu_edit_callback_ ## _name () \
{ \
if ((int32_t)encoderPosition < minEditValue) \
encoderPosition = minEditValue; \
if ((int32_t)encoderPosition > maxEditValue) \
encoderPosition = maxEditValue; \
if (lcdDrawUpdate) \
lcd_implementation_drawedit(editLabel, _strFunc(((_type)encoderPosition) / scale)); \
if (LCD_CLICKED) \
{ \
*((_type*)editValue) = ((_type)encoderPosition) / scale; \
lcd_quick_feedback(); \
currentMenu = prevMenu; \
encoderPosition = prevEncoderPosition; \
(*callbackFunc)();\
} \
} \
static void menu_action_setting_edit_ ## _name (const char* pstr, _type* ptr, _type minValue, _type maxValue) \
{ \
prevMenu = currentMenu; \
prevEncoderPosition = encoderPosition; \
\
lcdDrawUpdate = 2; \
currentMenu = menu_edit_ ## _name; \
\
editLabel = pstr; \
editValue = ptr; \
minEditValue = minValue * scale; \
maxEditValue = maxValue * scale; \
encoderPosition = (*ptr) * scale; \
}\
static void menu_action_setting_edit_callback_ ## _name (const char* pstr, _type* ptr, _type minValue, _type maxValue, menuFunc_t callback) \
{ \
prevMenu = currentMenu; \
prevEncoderPosition = encoderPosition; \
\
lcdDrawUpdate = 2; \
currentMenu = menu_edit_callback_ ## _name; \
\
editLabel = pstr; \
editValue = ptr; \
minEditValue = minValue * scale; \
maxEditValue = maxValue * scale; \
encoderPosition = (*ptr) * scale; \
callbackFunc = callback;\
}
menu_edit_type(int, int3, itostr3, 1)
menu_edit_type(float, float3, ftostr3, 1)
menu_edit_type(float, float32, ftostr32, 100)
menu_edit_type(float, float5, ftostr5, 0.01)
menu_edit_type(float, float51, ftostr51, 10)
menu_edit_type(float, float52, ftostr52, 100)
menu_edit_type(unsigned long, long5, ftostr5, 0.01)
#ifdef REPRAPWORLD_KEYPAD
static void reprapworld_keypad_move_z_up() {
encoderPosition = 1;
move_menu_scale = REPRAPWORLD_KEYPAD_MOVE_STEP;
lcd_move_z();
}
static void reprapworld_keypad_move_z_down() {
encoderPosition = -1;
move_menu_scale = REPRAPWORLD_KEYPAD_MOVE_STEP;
lcd_move_z();
}
static void reprapworld_keypad_move_x_left() {
encoderPosition = -1;
move_menu_scale = REPRAPWORLD_KEYPAD_MOVE_STEP;
lcd_move_x();
}
static void reprapworld_keypad_move_x_right() {
encoderPosition = 1;
move_menu_scale = REPRAPWORLD_KEYPAD_MOVE_STEP;
lcd_move_x();
}
static void reprapworld_keypad_move_y_down() {
encoderPosition = 1;
move_menu_scale = REPRAPWORLD_KEYPAD_MOVE_STEP;
lcd_move_y();
}
static void reprapworld_keypad_move_y_up() {
encoderPosition = -1;
move_menu_scale = REPRAPWORLD_KEYPAD_MOVE_STEP;
lcd_move_y();
}
static void reprapworld_keypad_move_home() {
enquecommand_P((PSTR("G28"))); // move all axis home
}
#endif
/** End of menus **/
static void lcd_quick_feedback()
{
lcdDrawUpdate = 2;
blocking_enc = millis() + 500;
lcd_implementation_quick_feedback();
}
/** Menu action functions **/
static void menu_action_back(menuFunc_t data)
{
currentMenu = data;
encoderPosition = 0;
}
static void menu_action_submenu(menuFunc_t data)
{
currentMenu = data;
encoderPosition = 0;
}
static void menu_action_gcode(const char* pgcode)
{
enquecommand_P(pgcode);
}
static void menu_action_function(menuFunc_t data)
{
(*data)();
}
static void menu_action_sdfile(const char* filename, char* longFilename)
{
char cmd[30];
char* c;
sprintf_P(cmd, PSTR("M23 %s"), filename);
for(c = &cmd[4]; *c; c++)
*c = tolower(*c);
enquecommand(cmd);
enquecommand_P(PSTR("M24"));
lcd_return_to_status();
}
static void menu_action_sddirectory(const char* filename, char* longFilename)
{
card.chdir(filename);
encoderPosition = 0;
}
static void menu_action_setting_edit_bool(const char* pstr, bool* ptr)
{
*ptr = !(*ptr);
}
#endif//ULTIPANEL
/** LCD API **/
void lcd_init()
{
lcd_implementation_init();
#ifdef NEWPANEL
pinMode(BTN_EN1,INPUT);
pinMode(BTN_EN2,INPUT);
WRITE(BTN_EN1,HIGH);
WRITE(BTN_EN2,HIGH);
#if BTN_ENC > 0
pinMode(BTN_ENC,INPUT);
WRITE(BTN_ENC,HIGH);
#endif
#ifdef REPRAPWORLD_KEYPAD
pinMode(SHIFT_CLK,OUTPUT);
pinMode(SHIFT_LD,OUTPUT);
pinMode(SHIFT_OUT,INPUT);
WRITE(SHIFT_OUT,HIGH);
WRITE(SHIFT_LD,HIGH);
#endif
#else // Not NEWPANEL
#ifdef SR_LCD_2W_NL // Non latching 2 wire shift register
pinMode (SR_DATA_PIN, OUTPUT);
pinMode (SR_CLK_PIN, OUTPUT);
#elif defined(SHIFT_CLK)
pinMode(SHIFT_CLK,OUTPUT);
pinMode(SHIFT_LD,OUTPUT);
pinMode(SHIFT_EN,OUTPUT);
pinMode(SHIFT_OUT,INPUT);
WRITE(SHIFT_OUT,HIGH);
WRITE(SHIFT_LD,HIGH);
WRITE(SHIFT_EN,LOW);
#else
#ifdef ULTIPANEL
#error ULTIPANEL requires an encoder
#endif
#endif // SR_LCD_2W_NL
#endif//!NEWPANEL
#if defined (SDSUPPORT) && defined(SDCARDDETECT) && (SDCARDDETECT > 0)
pinMode(SDCARDDETECT,INPUT);
WRITE(SDCARDDETECT, HIGH);
lcd_oldcardstatus = IS_SD_INSERTED;
#endif//(SDCARDDETECT > 0)
#ifdef LCD_HAS_SLOW_BUTTONS
slow_buttons = 0;
#endif
lcd_buttons_update();
#ifdef ULTIPANEL
encoderDiff = 0;
#endif
}
void lcd_update()
{
static unsigned long timeoutToStatus = 0;
#ifdef LCD_HAS_SLOW_BUTTONS
slow_buttons = lcd_implementation_read_slow_buttons(); // buttons which take too long to read in interrupt context
#endif
lcd_buttons_update();
#if (SDCARDDETECT > 0)
if((IS_SD_INSERTED != lcd_oldcardstatus))
{
lcdDrawUpdate = 2;
lcd_oldcardstatus = IS_SD_INSERTED;
lcd_implementation_init(); // to maybe revive the LCD if static electricity killed it.
if(lcd_oldcardstatus)
{
card.initsd();
LCD_MESSAGEPGM(MSG_SD_INSERTED);
}
else
{
card.release();
LCD_MESSAGEPGM(MSG_SD_REMOVED);
}
}
#endif//CARDINSERTED
if (lcd_next_update_millis < millis())
{
#ifdef ULTIPANEL
#ifdef REPRAPWORLD_KEYPAD
if (REPRAPWORLD_KEYPAD_MOVE_Z_UP) {
reprapworld_keypad_move_z_up();
}
if (REPRAPWORLD_KEYPAD_MOVE_Z_DOWN) {
reprapworld_keypad_move_z_down();
}
if (REPRAPWORLD_KEYPAD_MOVE_X_LEFT) {
reprapworld_keypad_move_x_left();
}
if (REPRAPWORLD_KEYPAD_MOVE_X_RIGHT) {
reprapworld_keypad_move_x_right();
}
if (REPRAPWORLD_KEYPAD_MOVE_Y_DOWN) {
reprapworld_keypad_move_y_down();
}
if (REPRAPWORLD_KEYPAD_MOVE_Y_UP) {
reprapworld_keypad_move_y_up();
}
if (REPRAPWORLD_KEYPAD_MOVE_HOME) {
reprapworld_keypad_move_home();
}
#endif
if (abs(encoderDiff) >= ENCODER_PULSES_PER_STEP)
{
lcdDrawUpdate = 1;
encoderPosition += encoderDiff / ENCODER_PULSES_PER_STEP;
encoderDiff = 0;
timeoutToStatus = millis() + LCD_TIMEOUT_TO_STATUS;
}
if (LCD_CLICKED)
timeoutToStatus = millis() + LCD_TIMEOUT_TO_STATUS;
#endif//ULTIPANEL
#ifdef DOGLCD // Changes due to different driver architecture of the DOGM display
blink++; // Variable for fan animation and alive dot
u8g.firstPage();
do
{
u8g.setFont(u8g_font_6x10_marlin);
u8g.setPrintPos(125,0);
if (blink % 2) u8g.setColorIndex(1); else u8g.setColorIndex(0); // Set color for the alive dot
u8g.drawPixel(127,63); // draw alive dot
u8g.setColorIndex(1); // black on white
(*currentMenu)();
if (!lcdDrawUpdate) break; // Terminate display update, when nothing new to draw. This must be done before the last dogm.next()
} while( u8g.nextPage() );
#else
(*currentMenu)();
#endif
#ifdef LCD_HAS_STATUS_INDICATORS
lcd_implementation_update_indicators();
#endif
#ifdef ULTIPANEL
if(timeoutToStatus < millis() && currentMenu != lcd_status_screen)
{
lcd_return_to_status();
lcdDrawUpdate = 2;
}
#endif//ULTIPANEL
if (lcdDrawUpdate == 2)
lcd_implementation_clear();
if (lcdDrawUpdate)
lcdDrawUpdate--;
lcd_next_update_millis = millis() + 100;
}
}
void lcd_setstatus(const char* message)
{
if (lcd_status_message_level > 0)
return;
strncpy(lcd_status_message, message, LCD_WIDTH);
lcdDrawUpdate = 2;
}
void lcd_setstatuspgm(const char* message)
{
if (lcd_status_message_level > 0)
return;
strncpy_P(lcd_status_message, message, LCD_WIDTH);
lcdDrawUpdate = 2;
}
void lcd_setalertstatuspgm(const char* message)
{
lcd_setstatuspgm(message);
lcd_status_message_level = 1;
#ifdef ULTIPANEL
lcd_return_to_status();
#endif//ULTIPANEL
}
void lcd_reset_alert_level()
{
lcd_status_message_level = 0;
}
#ifdef DOGLCD
void lcd_setcontrast(uint8_t value)
{
lcd_contrast = value & 63;
u8g.setContrast(lcd_contrast);
}
#endif
#ifdef ULTIPANEL
/* Warning: This function is called from interrupt context */
void lcd_buttons_update()
{
#ifdef NEWPANEL
uint8_t newbutton=0;
if(READ(BTN_EN1)==0) newbutton|=EN_A;
if(READ(BTN_EN2)==0) newbutton|=EN_B;
#if BTN_ENC > 0
if((blocking_enc<millis()) && (READ(BTN_ENC)==0))
newbutton |= EN_C;
#endif
buttons = newbutton;
#ifdef LCD_HAS_SLOW_BUTTONS
buttons |= slow_buttons;
#endif
#ifdef REPRAPWORLD_KEYPAD
// for the reprapworld_keypad
uint8_t newbutton_reprapworld_keypad=0;
WRITE(SHIFT_LD,LOW);
WRITE(SHIFT_LD,HIGH);
for(int8_t i=0;i<8;i++) {
newbutton_reprapworld_keypad = newbutton_reprapworld_keypad>>1;
if(READ(SHIFT_OUT))
newbutton_reprapworld_keypad|=(1<<7);
WRITE(SHIFT_CLK,HIGH);
WRITE(SHIFT_CLK,LOW);
}
buttons_reprapworld_keypad=~newbutton_reprapworld_keypad; //invert it, because a pressed switch produces a logical 0
#endif
#else //read it from the shift register
uint8_t newbutton=0;
WRITE(SHIFT_LD,LOW);
WRITE(SHIFT_LD,HIGH);
unsigned char tmp_buttons=0;
for(int8_t i=0;i<8;i++)
{
newbutton = newbutton>>1;
if(READ(SHIFT_OUT))
newbutton|=(1<<7);
WRITE(SHIFT_CLK,HIGH);
WRITE(SHIFT_CLK,LOW);
}
buttons=~newbutton; //invert it, because a pressed switch produces a logical 0
#endif//!NEWPANEL
//manage encoder rotation
uint8_t enc=0;
if(buttons&EN_A)
enc|=(1<<0);
if(buttons&EN_B)
enc|=(1<<1);
if(enc != lastEncoderBits)
{
switch(enc)
{
case encrot0:
if(lastEncoderBits==encrot3)
encoderDiff++;
else if(lastEncoderBits==encrot1)
encoderDiff--;
break;
case encrot1:
if(lastEncoderBits==encrot0)
encoderDiff++;
else if(lastEncoderBits==encrot2)
encoderDiff--;
break;
case encrot2:
if(lastEncoderBits==encrot1)
encoderDiff++;
else if(lastEncoderBits==encrot3)
encoderDiff--;
break;
case encrot3:
if(lastEncoderBits==encrot2)
encoderDiff++;
else if(lastEncoderBits==encrot0)
encoderDiff--;
break;
}
}
lastEncoderBits = enc;
}
void lcd_buzz(long duration, uint16_t freq)
{
#ifdef LCD_USE_I2C_BUZZER
lcd.buzz(duration,freq);
#endif
}
bool lcd_clicked()
{
return LCD_CLICKED;
}
#endif//ULTIPANEL
/********************************/
/** Float conversion utilities **/
/********************************/
// convert float to string with +123.4 format
char conv[8];
char *ftostr3(const float &x)
{
return itostr3((int)x);
}
char *itostr2(const uint8_t &x)
{
//sprintf(conv,"%5.1f",x);
int xx=x;
conv[0]=(xx/10)%10+'0';
conv[1]=(xx)%10+'0';
conv[2]=0;
return conv;
}
// convert float to string with +123.4 format
char *ftostr31(const float &x)
{
int xx=x*10;
conv[0]=(xx>=0)?'+':'-';
xx=abs(xx);
conv[1]=(xx/1000)%10+'0';
conv[2]=(xx/100)%10+'0';
conv[3]=(xx/10)%10+'0';
conv[4]='.';
conv[5]=(xx)%10+'0';
conv[6]=0;
return conv;
}
// convert float to string with 123.4 format
char *ftostr31ns(const float &x)
{
int xx=x*10;
//conv[0]=(xx>=0)?'+':'-';
xx=abs(xx);
conv[0]=(xx/1000)%10+'0';
conv[1]=(xx/100)%10+'0';
conv[2]=(xx/10)%10+'0';
conv[3]='.';
conv[4]=(xx)%10+'0';
conv[5]=0;
return conv;
}
char *ftostr32(const float &x)
{
long xx=x*100;
if (xx >= 0)
conv[0]=(xx/10000)%10+'0';
else
conv[0]='-';
xx=abs(xx);
conv[1]=(xx/1000)%10+'0';
conv[2]=(xx/100)%10+'0';
conv[3]='.';
conv[4]=(xx/10)%10+'0';
conv[5]=(xx)%10+'0';
conv[6]=0;
return conv;
}
char *itostr31(const int &xx)
{
conv[0]=(xx>=0)?'+':'-';
conv[1]=(xx/1000)%10+'0';
conv[2]=(xx/100)%10+'0';
conv[3]=(xx/10)%10+'0';
conv[4]='.';
conv[5]=(xx)%10+'0';
conv[6]=0;
return conv;
}
char *itostr3(const int &xx)
{
if (xx >= 100)
conv[0]=(xx/100)%10+'0';
else
conv[0]=' ';
if (xx >= 10)
conv[1]=(xx/10)%10+'0';
else
conv[1]=' ';
conv[2]=(xx)%10+'0';
conv[3]=0;
return conv;
}
char *itostr3left(const int &xx)
{
if (xx >= 100)
{
conv[0]=(xx/100)%10+'0';
conv[1]=(xx/10)%10+'0';
conv[2]=(xx)%10+'0';
conv[3]=0;
}
else if (xx >= 10)
{
conv[0]=(xx/10)%10+'0';
conv[1]=(xx)%10+'0';
conv[2]=0;
}
else
{
conv[0]=(xx)%10+'0';
conv[1]=0;
}
return conv;
}
char *itostr4(const int &xx)
{
if (xx >= 1000)
conv[0]=(xx/1000)%10+'0';
else
conv[0]=' ';
if (xx >= 100)
conv[1]=(xx/100)%10+'0';
else
conv[1]=' ';
if (xx >= 10)
conv[2]=(xx/10)%10+'0';
else
conv[2]=' ';
conv[3]=(xx)%10+'0';
conv[4]=0;
return conv;
}
// convert float to string with 12345 format
char *ftostr5(const float &x)
{
long xx=abs(x);
if (xx >= 10000)
conv[0]=(xx/10000)%10+'0';
else
conv[0]=' ';
if (xx >= 1000)
conv[1]=(xx/1000)%10+'0';
else
conv[1]=' ';
if (xx >= 100)
conv[2]=(xx/100)%10+'0';
else
conv[2]=' ';
if (xx >= 10)
conv[3]=(xx/10)%10+'0';
else
conv[3]=' ';
conv[4]=(xx)%10+'0';
conv[5]=0;
return conv;
}
// convert float to string with +1234.5 format
char *ftostr51(const float &x)
{
long xx=x*10;
conv[0]=(xx>=0)?'+':'-';
xx=abs(xx);
conv[1]=(xx/10000)%10+'0';
conv[2]=(xx/1000)%10+'0';
conv[3]=(xx/100)%10+'0';
conv[4]=(xx/10)%10+'0';
conv[5]='.';
conv[6]=(xx)%10+'0';
conv[7]=0;
return conv;
}
// convert float to string with +123.45 format
char *ftostr52(const float &x)
{
long xx=x*100;
conv[0]=(xx>=0)?'+':'-';
xx=abs(xx);
conv[1]=(xx/10000)%10+'0';
conv[2]=(xx/1000)%10+'0';
conv[3]=(xx/100)%10+'0';
conv[4]='.';
conv[5]=(xx/10)%10+'0';
conv[6]=(xx)%10+'0';
conv[7]=0;
return conv;
}
// Callback for after editing PID i value
// grab the PID i value out of the temp variable; scale it; then update the PID driver
void copy_and_scalePID_i()
{
#ifdef PIDTEMP
Ki = scalePID_i(raw_Ki);
updatePID();
#endif
}
// Callback for after editing PID d value
// grab the PID d value out of the temp variable; scale it; then update the PID driver
void copy_and_scalePID_d()
{
#ifdef PIDTEMP
Kd = scalePID_d(raw_Kd);
updatePID();
#endif
}
#endif //ULTRA_LCD
#ifndef ULTRALCD_H
#define ULTRALCD_H
#include "Marlin.h"
#ifdef ULTRA_LCD
void lcd_update();
void lcd_init();
void lcd_setstatus(const char* message);
void lcd_setstatuspgm(const char* message);
void lcd_setalertstatuspgm(const char* message);
void lcd_reset_alert_level();
#ifdef DOGLCD
extern int lcd_contrast;
void lcd_setcontrast(uint8_t value);
#endif
static unsigned char blink = 0; // Variable for visualization of fan rotation in GLCD
#define LCD_MESSAGEPGM(x) lcd_setstatuspgm(PSTR(x))
#define LCD_ALERTMESSAGEPGM(x) lcd_setalertstatuspgm(PSTR(x))
#define LCD_UPDATE_INTERVAL 100
#define LCD_TIMEOUT_TO_STATUS 15000
#ifdef ULTIPANEL
void lcd_buttons_update();
extern volatile uint8_t buttons; //the last checked buttons in a bit array.
#ifdef REPRAPWORLD_KEYPAD
extern volatile uint8_t buttons_reprapworld_keypad; // to store the keypad shift register values
#endif
#else
FORCE_INLINE void lcd_buttons_update() {}
#endif
extern int plaPreheatHotendTemp;
extern int plaPreheatHPBTemp;
extern int plaPreheatFanSpeed;
extern int absPreheatHotendTemp;
extern int absPreheatHPBTemp;
extern int absPreheatFanSpeed;
void lcd_buzz(long duration,uint16_t freq);
bool lcd_clicked();
#ifdef NEWPANEL
#define EN_C (1<<BLEN_C)
#define EN_B (1<<BLEN_B)
#define EN_A (1<<BLEN_A)
#define LCD_CLICKED (buttons&EN_C)
#ifdef REPRAPWORLD_KEYPAD
#define EN_REPRAPWORLD_KEYPAD_F3 (1<<BLEN_REPRAPWORLD_KEYPAD_F3)
#define EN_REPRAPWORLD_KEYPAD_F2 (1<<BLEN_REPRAPWORLD_KEYPAD_F2)
#define EN_REPRAPWORLD_KEYPAD_F1 (1<<BLEN_REPRAPWORLD_KEYPAD_F1)
#define EN_REPRAPWORLD_KEYPAD_UP (1<<BLEN_REPRAPWORLD_KEYPAD_UP)
#define EN_REPRAPWORLD_KEYPAD_RIGHT (1<<BLEN_REPRAPWORLD_KEYPAD_RIGHT)
#define EN_REPRAPWORLD_KEYPAD_MIDDLE (1<<BLEN_REPRAPWORLD_KEYPAD_MIDDLE)
#define EN_REPRAPWORLD_KEYPAD_DOWN (1<<BLEN_REPRAPWORLD_KEYPAD_DOWN)
#define EN_REPRAPWORLD_KEYPAD_LEFT (1<<BLEN_REPRAPWORLD_KEYPAD_LEFT)
#define LCD_CLICKED ((buttons&EN_C) || (buttons_reprapworld_keypad&EN_REPRAPWORLD_KEYPAD_F1))
#define REPRAPWORLD_KEYPAD_MOVE_Z_UP (buttons_reprapworld_keypad&EN_REPRAPWORLD_KEYPAD_F2)
#define REPRAPWORLD_KEYPAD_MOVE_Z_DOWN (buttons_reprapworld_keypad&EN_REPRAPWORLD_KEYPAD_F3)
#define REPRAPWORLD_KEYPAD_MOVE_X_LEFT (buttons_reprapworld_keypad&EN_REPRAPWORLD_KEYPAD_LEFT)
#define REPRAPWORLD_KEYPAD_MOVE_X_RIGHT (buttons_reprapworld_keypad&EN_REPRAPWORLD_KEYPAD_RIGHT)
#define REPRAPWORLD_KEYPAD_MOVE_Y_DOWN (buttons_reprapworld_keypad&EN_REPRAPWORLD_KEYPAD_DOWN)
#define REPRAPWORLD_KEYPAD_MOVE_Y_UP (buttons_reprapworld_keypad&EN_REPRAPWORLD_KEYPAD_UP)
#define REPRAPWORLD_KEYPAD_MOVE_HOME (buttons_reprapworld_keypad&EN_REPRAPWORLD_KEYPAD_MIDDLE)
#endif //REPRAPWORLD_KEYPAD
#else
//atomic, do not change
#define B_LE (1<<BL_LE)
#define B_UP (1<<BL_UP)
#define B_MI (1<<BL_MI)
#define B_DW (1<<BL_DW)
#define B_RI (1<<BL_RI)
#define B_ST (1<<BL_ST)
#define EN_B (1<<BLEN_B)
#define EN_A (1<<BLEN_A)
#define LCD_CLICKED ((buttons&B_MI)||(buttons&B_ST))
#endif//NEWPANEL
#else //no LCD
FORCE_INLINE void lcd_update() {}
FORCE_INLINE void lcd_init() {}
FORCE_INLINE void lcd_setstatus(const char* message) {}
FORCE_INLINE void lcd_buttons_update() {}
FORCE_INLINE void lcd_reset_alert_level() {}
FORCE_INLINE void lcd_buzz(long duration,uint16_t freq) {}
#define LCD_MESSAGEPGM(x)
#define LCD_ALERTMESSAGEPGM(x)
#endif
char *itostr2(const uint8_t &x);
char *itostr31(const int &xx);
char *itostr3(const int &xx);
char *itostr3left(const int &xx);
char *itostr4(const int &xx);
char *ftostr3(const float &x);
char *ftostr31ns(const float &x); // float to string without sign character
char *ftostr31(const float &x);
char *ftostr32(const float &x);
char *ftostr5(const float &x);
char *ftostr51(const float &x);
char *ftostr52(const float &x);
#endif //ULTRALCD
Для тахомерчика выкладывать?
Ну скажем
#define RPMpin 2 // катушка зажигания
volatile long rpm = 0;
void setup()
{
Serial.begin(9600);
attachInterrupt(0, RPM, FALLING);
}
void loop()
{
Serial.println(rpm, DEC); // об/мин
delay(100);
}
void RPM ()
{
static unsigned long micros_prev;
rpm = (1000000.0/(micros() - micros_prev))*60/2;
micros_prev = micros();
}
немного не в тему но может кто знает где в Минске можно найти такие разъемы https://www.sparkfun.com/products/570 ?
код для тахометра интересный, только вот у меня 7-ми сегментный двух разрядный индикатор
Народ, и сразу же появился вопрос. Пробовал вчера побаловаться с дисплейчиком от nokia 5110. Целый день провозился, а он собака так и не заработал, попробовал подключить на работе к ноуту и блин, никаких проблем, запустилось все с первого раза. Причем ставил туже самую библиотеку и загружал тот же скетч. Опять пришел проверить дома, и опять какая-то хрень.
Выскочила ошибка
Arduino: 1.5.8 ( Windows 8 ), Board: "Arduino Uno"
sketch_dec01a.ino:11:38: error: variable 'logoBmp' must be const in order to be put into read-only section by means of '__attribute__((progmem))'
Ошибка компиляции.This report would have more information with
"Show verbose output during compilation"
enabled in File > Preferences.
А это собственно сам скетч
#include <Adafruit_GFX.h>
#include <Adafruit_PCD8544.h>// pin 3 - Serial clock out (SCLK)
// pin 4 - Serial data out (DIN)
// pin 5 - Data/Command select (D/C)
// pin 7 - LCD chip select (CS)
// pin 6 - LCD reset (RST)
Adafruit_PCD8544 display = Adafruit_PCD8544(3, 4, 5, 7, 6);static unsigned char PROGMEM logoBmp[] =
{
B11111111, B11111111, B10000000,
B11111111, B11111111, B10000000,
B11111111, B11111111, B10000000,
B11111100, B00000011, B10000000,
B11111000, B00000001, B10000000,
B11111100, B00000011, B10000000,
B11111111, B11000011, B10000000,
B11111111, B10000111, B10000000,
B11111111, B10001111, B10000000,
B11111111, B00001111, B10000000,
B11111110, B00011111, B10000000,
B11111110, B00011111, B10000000,
B11111100, B00111111, B10000000,
B11111100, B01111111, B10000000,
B11111000, B00000011, B10000000,
B11111000, B00000001, B10000000
};void setup() {
Serial.begin(9600);// Инициализация дисплея
display.begin();// Очищаем дисплей
display.clearDisplay();
display.display();// Устанавливаем контраст
display.setContrast(50);
delay(1000);
}void loop()
{
// Рисуем заранее подготовленное лого
// Подготовлен массив из 16 пар байтов
// каждый байт состоит из 8 битов, соответсвенно
// получаем матрицу 16х16 битов, 1-черный цвет, 0-белый цвет
display.drawBitmap(LCDWIDTH/2-8, LCDHEIGHT/2-8, logoBmp, 24, 16, BLACK); // x, y, logo, w, h, color
display.display();
delay(10000);
// Рисуем несколько пикселей (точек)
display.drawPixel(0, 0, BLACK);
display.drawPixel(1, 1, BLACK);
display.drawPixel(2, 2, WHITE); // Посередине белый пиксель
display.drawPixel(3, 3, BLACK);
display.drawPixel(4, 4, BLACK);
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);// Рисуем диагональ
display.drawLine(0, LCDHEIGHT-1, LCDWIDTH, 0, BLACK); // x0, y0, x1, y1, color
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);// Для рисования вертикальных и горизонтальных линий лучше использовать
// более быстрые функции
display.drawFastVLine(LCDWIDTH/2, 0, LCDHEIGHT, BLACK); // x, y, h, color
display.drawFastHLine(0, LCDHEIGHT/2, LCDWIDTH, BLACK); //x, y, w, color
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);// Рисуем прямоугольник
display.drawRect(LCDWIDTH/4, LCDHEIGHT/4, LCDWIDTH/2, LCDHEIGHT/2, BLACK); // x, y, w, h, color
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);// Рисуем закрашенный прямоугольник
display.fillRect(LCDWIDTH/4, LCDHEIGHT/4, LCDWIDTH/2, LCDHEIGHT/2, BLACK); // x, y, w, h, color
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);// Закрашиваем весь дисплей
display.fillScreen(BLACK);
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);// Рисуем окружность
display.drawCircle(LCDWIDTH/2, LCDHEIGHT/2, LCDHEIGHT/2, BLACK); // x, y, r, color
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);// Рисуем закрашенную окружность
display.fillCircle(LCDWIDTH/2, LCDHEIGHT/2, LCDHEIGHT/2, BLACK); // x, y, r, color
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);// Рисуем треугольник
display.drawTriangle(LCDWIDTH/4, LCDHEIGHT/4, 3*LCDWIDTH/4, LCDHEIGHT/4, LCDWIDTH/2, 3*LCDHEIGHT/4, BLACK); // x0, y0, x1, y1, x2, y2, color
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);// Рисуем закрашенный треугольник
display.fillTriangle(LCDWIDTH/4, LCDHEIGHT/4, 3*LCDWIDTH/4, LCDHEIGHT/4, LCDWIDTH/2, 3*LCDHEIGHT/4, BLACK); // x0, y0, x1, y1, x2, y2, color
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);// Рисуем прямоугольник с закругленными углами
display.drawRoundRect(LCDWIDTH/4, LCDHEIGHT/4, LCDWIDTH/2, LCDHEIGHT/2, 10, BLACK); // x, y, w, h, r, color
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);// Рисуем закрашенный прямоугольник с закругленными углами
display.fillRoundRect(LCDWIDTH/4, LCDHEIGHT/4, LCDWIDTH/2, LCDHEIGHT/2, 10, BLACK); // x, y, w, h, r, colordisplay.display();
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);// Рисуем заранее подготовленное лого
// Подготовлен массив из 16 пар байтов
// каждый байт состоит из 8 битов, соответсвенно
// получаем матрицу 16х16 битов, 1-черный цвет, 0-белый цвет
display.drawBitmap(LCDWIDTH/2-8, LCDHEIGHT/2-8, logoBmp, 24, 16, BLACK); // x, y, logo, w, h, color
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);// Выведем текст
// Устанавливаем курсор
display.setCursor(0, 0);
// Устанавливаем цвет текста
display.setTextColor(BLACK);
// Устанавливаем размер текста
display.setTextSize(1);
// Выводим текст
display.write('Z');
display.write('e');
display.write('l');
display.write('e');
display.write('c');
display.write('t');
display.write('r');
display.write('o');
display.display();
delay(1000);// Очищаем дисплей
display.clearDisplay();
display.display();
delay(1000);
}
Что не так, помогите кто плиз.
попробуйте
static unsigned char PROGMEMпоменять на
const unsigned char PROGMEM



